ちなみにちゃんとしたメーカ製モータの場合、逆起電力定数はカタログスペックとして記載されているので、そもそもこのような作業はいらないはずです。特性がよくわからないモータを使いたい場合などに参考になれば幸いです。
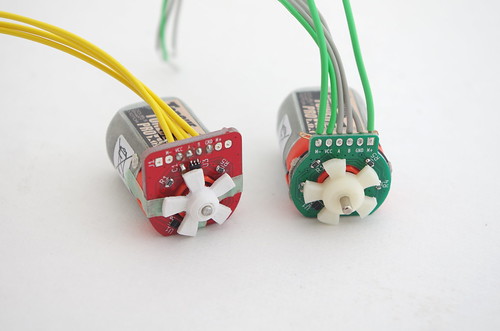
逆起電力測定回路

実験に使用するモータはPololu社のエンコーダ付き20:1ギアードモータで、タミヤのスポーツタイヤを取り付けて測定を行いました。DCモータの端子間電圧をR1・R2抵抗で1/3に分圧してマイコンのアナログピン(A0)に接続します。またこの時の回転速度も必要なのでエンコーダ出力をマイコンのデジタルピン(13と12)に接続します。DCモータのステップ応答を見るためバッテリーをプッシュスイッチを通してモータの+端子に接続します。実際の測定はプッシュスイッチをジャンパー線に置き換えて行いました。
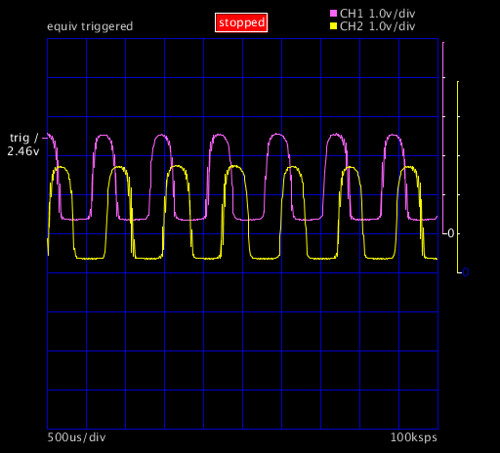
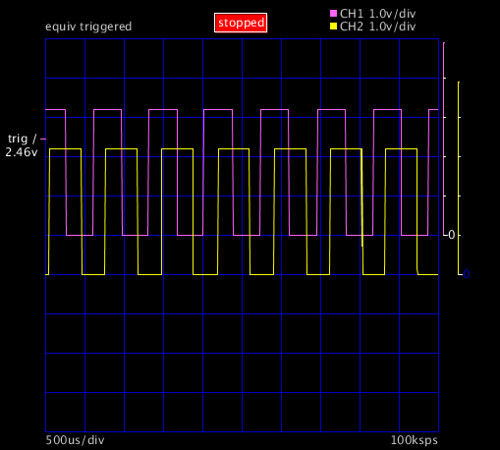
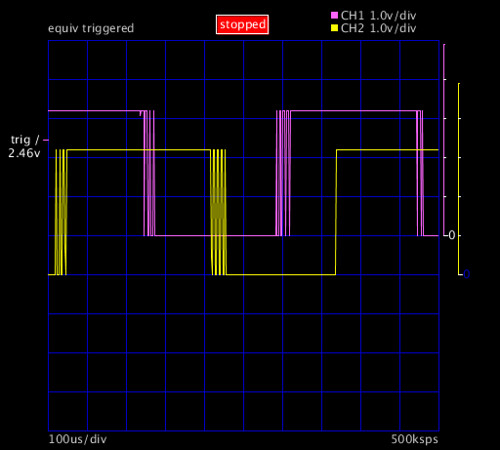
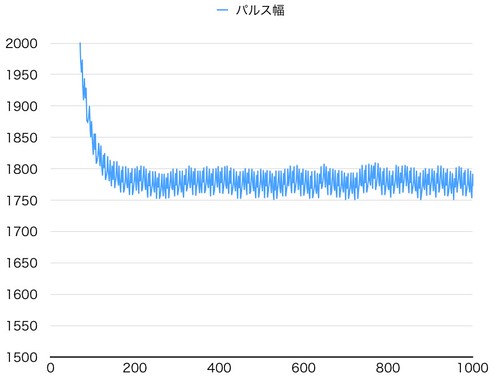
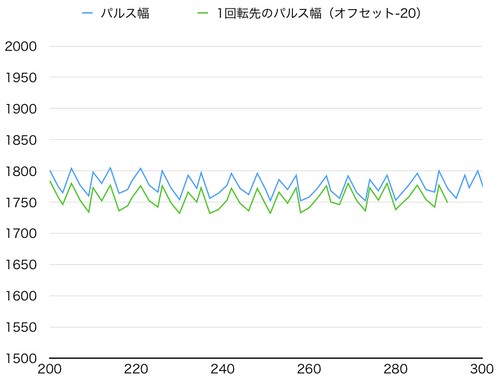
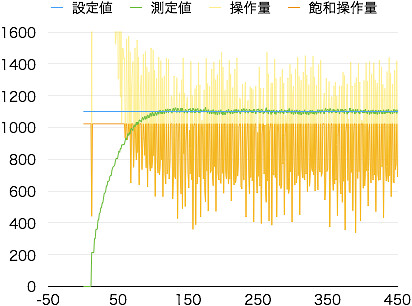
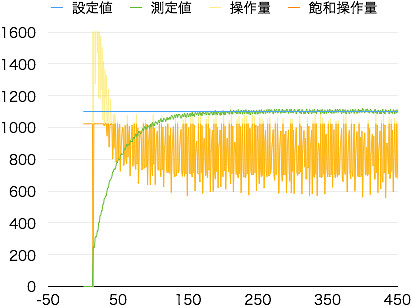
ステップ応答

DCモータに一定の電圧(エネループ6本直列)をかけた時のステップ応答です。回転速度が安定している間(電圧をかけている)の値は無視して、回転速度が降下している間(電圧をオフ)の値に注目します。
回転速度と逆起電力の関係
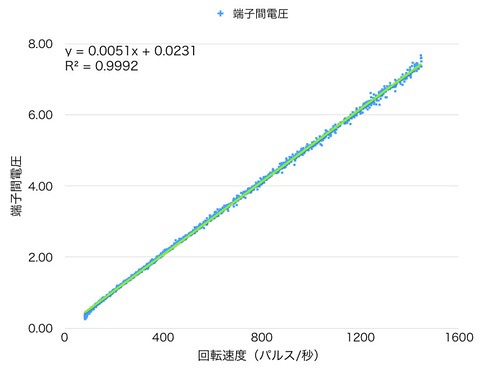
回転速度が降下中の端子間電圧(逆起電力)と回転速度をグラフにすると比例関係にあることがわかります。近似直線を求めると直線の傾き(0.0051x)が求まります。これが逆起電力定数です。逆起電力定数の単位はVs/radが一般的なので単位変換すると以下の値になりました。
0.009740Vs/rad
DCモータの特性
DCモータのトルクと電流は比例関係にあり次式で表すことができます。比例定数KTをトルク定数と呼びます。
トルク(Nm) = KT(Nm/A) * 電流(A)
DCモータの逆起電力と回転速度は比例関係にあり次式で表すことができます。比例定数KEを逆起電力定数と呼びます。逆起電力は電流の向きとは逆向きに発生し、電流を流れにくくします。
逆起電力(V) = KE(Vs/rad) * 回転速度(rad/s)
またKTとKEは同じ値になることが証明されています。
KT = KE
逆起電力はモータに電圧をかけて回している時も発生しています。モータに電圧をかけている時の端子間電圧と逆起電力の関係は次式で表すことができます。モータは両辺の電圧が釣り合う回転速度で回転します。
端子間電圧(V) = ブラシ接触電圧降下(V) + 巻線抵抗(R) * 電流(A) + 逆起電力(V)
ここでブラシ接触による電圧降下は無視するとして、PWM制御中のトルクは次式で求めることができる、はず。。
端子間電圧(V) = バッテリー電圧(V) * PWMデューティー(%)
逆起電力(V) = KE(Vs/rad) * 回転速度(rad/s)
電流(A) = (端子間電圧(V) - 逆起電力(V)) / 巻線抵抗(R)
トルク(Nm) = KT(Nm/A) * 電流(A)
疑問など
今回実験に使用したギアードモータのギアなし版のカタログスペック。
無負荷回転数 : 6200RPM@6V
起動トルク : 0.15kg-cm@2.4A (0.01471Nm)
上記値から逆起電力定数とトルク定数を計算したところ値が一致しませんでした。
逆起電力定数:0.009241Vs/rad
トルク定数:0.006129Nm/A
逆起電力定数はわりと近い値なんだけれどもトルク定数が66%ぐらいになっています。軸受けやブラシの摩擦の影響なのか、また他の要因なのかよくわかっていません。。
参考記事
2-1-2 回転原理の基礎 | 日本電産株式会社 - Nidec Corporation
2-1-3 DCモータの回転速度と逆起電力 | 日本電産株式会社 - Nidec Corporation
参考書籍
萩野 弘司 井桁 健一郎
CQ出版
売り上げランキング: 427,890
]]>